Вопрос 1 АСУТП.
Основные понятия дисциплины «АСУТП».
Автоматизация производственного процесса – это такая организация этого процесса, при которой его технологические операции осуществляются автоматически с помощью специальных устройств, без непосредственного участия человека. Автоматизация бывает двух типов:
- Автоматический контроль
- Автоматическое регулирование.
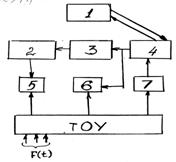
Автоматический контроль – это получение информации об изменении параметров ТП, с помощью технологических средств, которые выполняют функции наблюдения, отображения, записи, сигнализации.

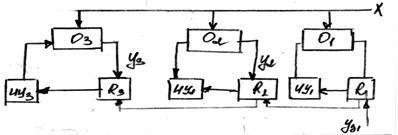
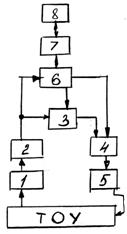
РИСУНОК 1. СТРУКТУРНАЯ СХЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ
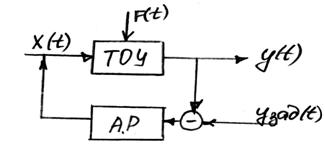
Автоматическое регулирование – это поддержание каких либо параметров ТП на заданном уровне при помощи специальных устройств, автоматических регуляторов.
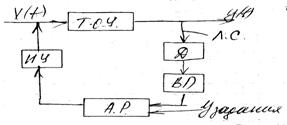
РИСУНОК 2. СТРУКТУРНАЯ СХЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Автоматизация бывает: частичная, комплексная, полная.
Частичная автоматизация – это полная механизация производства, с частичным автоматическим контролем. Вся информация о процессе собирается на щитах местного управления, которые находятся в непосредственной близости от оборудования.
Комплексная автоматизация – включает в себя автоматическое управление всеми стадиями производства, включая подготовку сырья и выход готовой продукции. Управление при этом осуществляется дистанционно, с центральных щитовых с применением ЭВМ.
Полная автоматизация – это автоматическое управление не только технологическими параметрами процесса, но и экономическими.
В общем случае АУ может реализовать три режима функционирования:
1. Советы оператора – когда вычислительное устройство получает текущую информацию о процессе и на ее основании с помощью различных методов вырабатывают оптимальный режим функционирования процесса, который в результате предлагается оперативному персоналу. За персоналом в свою очередь остается выбор воспользоваться советом или нет.
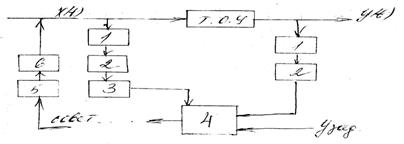
2. Режим супервизорный или режим наблюдения; когда ЭВМ, получает обрабатываемую информацию самостоятельную, через специальное технологическое устройство. Влияет на текущее показание процесса, т.е. без участия человека.
3. Режим непосредственного цифрового управления; когда всея схема состоит их цифровых приборов и управление осуществляется без посторонних вмешательств.
1- Первичные датчики, которые воспринимают информацию от объекта и устанавливаются в непосредственной близости к нему.
2- Усилители и преобразователи сигналов, предназначенные для усиления сигнала и для передачи их на большие расстояния, для преобразования нестандартных сигналов от датчика в стандартные, для преобразования сигнала одной физической природы в другую.
3- Вторичные приборы предназначенные для отображения, хранения, реализации информации.
4- Вторичные устройства предназначенные для выработки оптимальных показателей технологических параметров
4а – Аналоговый регулятор для выработки управляющего воздействия как сигнала рассогласования между у-заданным и данными вычислительного устройства.
5- ЦАП, предназначен для преобразования цифровых сигналов в аналоговые.
6- Исполнительное устройство, предназначенное для непосредственного воздействия на объект управления (его материальные или энергетические потоки), согласно сигналу от регулятора или вычислительного устройства.
Вопрос 2 АСУТП.
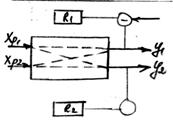
Привести пример выбора регулируемых параметров (процесс нагрева продукта в теплообменнике).
Показатели эффективности:
- температура нефтепродукта;
- производительность оборудования;
- минимальные энергетические затраты на процесс
Рассмотрим возможность регулирования основного показателя эффективности – температура нефтепродукта на выходе из теплообменника. ГСП представляет необходимые средства автоматизации и существует два канала для внесения регулируемых воздействий:
- Линия подачи нефтепродукта;
- Линия подачи греющего пара.
Использовать линию подачи нефтепродукта – экономически нецелесообразно, т.к. это приводит к колебанию нефтепродукта и следовательно к колебаниям производительности теплообменника, что недопустимо т.к. противоречит цели управления, поэтому для регулирования основного показателя эффективности, выбирается линия подачи греющего пара. Для поддержания второго показателя задается значение производительности, необходима стабилизация нагрузки процесса или расхода нефтепродукта на входе в теплообменник. Для поддержания третьего показателя эффективности необходимо стабилизировать расход греющего пара, однако т.к. на этой линии есть уже один клапан, схема стабилизации греющего пара устанавливается в цеховом коллекторе.
Таким образом, в качестве регулируемых параметров выбирается:
- Температура нефтепродукта на выходе из теплообменника, путем изменения расхода греющего пара.
- Расход нефтепродукта на входе в теплообменник с помощью схемы стабилизации.
- Расход греющего пара путем схемы стабилизации в цеховом коллекторе
Вопрос 3 АСУТП
Понятие
автоматического регулирования, управления.
Автоматическое управление-управление, осуществляемое без непосредственного участия человека. В общем случае автоматическое управление может реализовывать 3 режима функционирования: 1)совет оператору, когда вычислительное устройство(ЭВМ) получает текущую информацию о процессе и на ее основании с помощью различных математических методов вырабатывают оптимальный режим функционирования процесса, который в качестве совета предлагается оперативному составу. За персоналом остается выбор воспользоваться советом или нет.
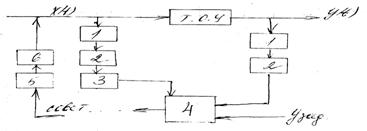
Рис. структурная схема.
 2)режим
наблюдения(супервизорный режим), когда вычислительная
машина, получая и обрабатывая информацию самостоятельно через специальное
техническое устройство влияет на текущие показания процесса, т.е. без участия
человека.
2)режим
наблюдения(супервизорный режим), когда вычислительная
машина, получая и обрабатывая информацию самостоятельно через специальное
техническое устройство влияет на текущие показания процесса, т.е. без участия
человека.
3)режим непосредственного цифрового управления, когда вся схема состоит из цифпровых приборов и управление осуществляется без постороннего вмешательства.
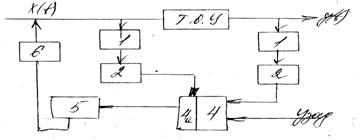
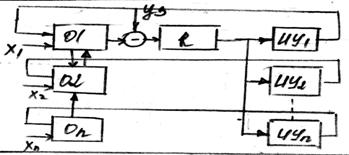
блок1-первичные датчики, которые воспринимают информацию от объекта и устанавливается в непосредственной близости к нему, блок2-усилители и преобразователи сигналов. Предназначены: для усиления сигналов, для передачи на большие расстояния, для преобразования нестандартных сигналов датчиков в стандартные и для преобразования сигналов одной физической природы в другую, блок3-вторичные приборы предназначены для отображения, хранения, регистрации информации, блок4-вычислительные устройства предназначены для выработки оптимальных показателей технических параметров, блок 4а-аналоговый регулытор предназначен для выработки управляющего воздействия как сигнала рассогласования между Узад и данными вычислительного устройства., блок5-ЦАП предназначен для преобразования цифровых сигналов в аналоговые, блок6- исполнительное устройство предназначено для непосредственного воздействия на объект управления (его материальные или энергетические потоки) согласно сигналу от регулятора или ЭВМ.
Автоматическое регулирование-это поддержание каких-либо параметров ТП на заданном уровне при помощи специальных устройств-автоматических регуляторов.
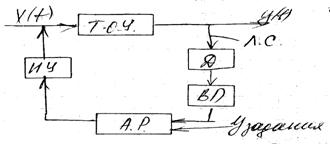
Рис. структурная схема
АР-автоматический регулятор, ИУ-исполнительное устройство, Д-датчик, ВТ-вторичный прибор.
Вопрос 4 АСУТП
Типы автоматизации
Автоматизация бывает: 1) Частичная 2) Комплексная 3) Полная
Частичная автоматизация- это полная механизация производства с частичным автоматическкким контролем. Вся информация о процессе собирается на щитах местного управления, которые расположены в непосредственной близости от оборудования.
Комплексная автоматизация - включает в себя автоматическое управление всеми основными стадиями производства, включая подготовку сырья и выход готовой продукции. Управление при этом осуществляется дистанционно с центральных щитовых с применением вычислительной техники.
Полная автоматизация- это
автоматическое управление не только технологическими параметрами процесса, но и
экономическими.
АСУТП Билет 5
"Привести пример выбора технических средств автоматизации (процесс нагрева
продукта в теплообменнике)"
Для регулирования температуры существуют следующие типы термометров (расширения, монометрические, термоэлектро, преобразователи и термометры сопротивления)
1. Биметаллические.
Используются в специальных лабораториях и обладают низкими метрологическими качественными характеристиками.
2. Манометрические являются лабораторными и используются для поверки технических средств других типов.
3. Термоэлектропреиобразователи. обладают необходимой точностью сроком службы, относительно дешевы, но менее точны по сравнению с термосопротивлением.
4. Термосопротивление являются наиболее дорогими термометрами но и самыми точными, по этому применяются в процессах где предъявляются наиболее жесткие требования.
Выбираем термометр сопротивления (Медный из экономических соображений) для управления необходимо выбрать закон регулирования. Существует дискретное и аналоговое управление. Дискретное или позиционное управление предлагает лишь два положения исполнительного механизма. В данном процессе полное перекрытие не пара не нефтепродукта не допускается, по этому для управления выбирается аналоговый закон. При пропорциональном управлении температура быстро стабилизируется при внесении каких либо возмущений, но не достигает исходного или заданного значения, т.е. существует какая-то статическая ошибка. ПИ регулятор данную статическую ошибку устраняет, но применяется для малоинерционных объектов.
Т.к. объект обладает большим запаздыванием выбирается ПИД регулятор.
Для регулирования температуры выбирается электрический исполнительный механизм т.к. его применение не предусматривает использование преобразователей из одного типа энергии в другой, что при всех прочих равных условиях более выгодно с экономической точки зрения.
Регулирования давления
1. Жидкостные манометры отличаются простотой устройства, относительно высокой точностью измерения.
2. Поршневые манометры применяются для градуировки и поверки различных видов манометров, т.к. отличаются высокой точностью и широким диапазоном измерений.
3. Деформационные манометры, преимущество их: простата устройства, надежность, универсальность, большой диапазон измерений.
4. Электрические манометры бывают индуктивные, сопротивления, емкостные, тензорезисторные, пьезоэлектические.
Вопрос 6 АСУТП
Понятие о
математических моделях объектов управления
Процессы, протекающие в объектах с достаточной степенью точности могут быть описаны с помощью математических зависимостей. Совокупность математических уравнений отражающих совокупность входных и выходных величин объекта управления дополнены ограничениями, которые накладываются на эти величины. Условиями их физической реализации и безопасной эксплуатации представляют собой мат модель объекта. Мат модель должна отражать особенности ТОУ, существенные с точки зрения его уравнения, быть адекватной моделируемому объекту, т.е. достаточно точно отражать качественные и количественные характеристики ТОУ; быть по возможности простой . В соответствии с физической сущностью процессов, протекающих в ТОУ мат модели делятся на две группы: 1)модель, значения выходных величин однозначно определяется значениями входных величин - детерминированные. Для их решения используются методы классического исчисления.
2)модели, в которых отсутствует четкое взаимодействие между значениями входных и выходных величин. Они связаны случайными функциями времени- стохастическими. Для их решения используются аппарат теории вероятности или мат статистики.
Вопрос 7 АСУТП Привести пример описания тех. процесса
(процесс ректификации)
Ректификация -процесс, предназначенный для разделения жидких однородных смесей на составные вещества. Процесс протекает в ректификационной установке. В результате противоточного взаимодействия двух смесей паровой и жидкостной. Ректификационная установка состоит из тарельчатой ратификационной колонны, теплообменника исходной смеси (обогрев паром дефлегматора, охлаждение водой) и выносного кипятильника (обогрев паром)
Рис.
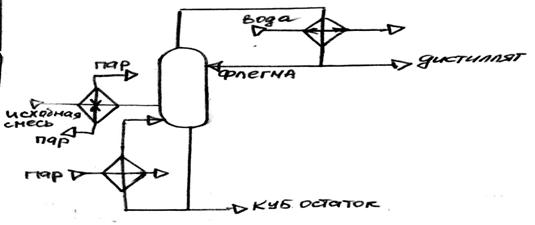
Суть процесса заключается в том что жидкие составляющие исходной смеси имеют разные температуры кипения. В результате противоточного действия происходит многократное испарение и конденсация на тарелках колонны. За счет этого достигается разделение исходной смеси на составляющие компоненты. Исходная смесь подается в среднею часть колонны после предварительного подогрева в теплообменнике. Смесь подогревается до температуры близкой к температуре кипения. Исх. Смесь по тарелкам стекает вниз колонны на встречу восходящему потоку пара. Пар образуется в нижней части колонны, называемым кубом, который заполняется до определенного уровня жидкости. Пар образуется при помощи нагрева кубовой жидкости выносным кипятильником. Пары смеси борбатируя слой жидкости осуществляет на тарелках теплообмен в результате которого из жидкости испаряется низко кипящий компонент (Н.К.) и из пара конденсируется высоко кипящий компонент (В.К.).
Таким образом жидкость обогащается В.К и пары -Н.К. жидкость скапливается в кубе колонны а пары подымаются в верх. Так в месте с теплообменом происходит массообмен. Пары в верхней части колонны поступает в дефлегматор где конденсируется и образуется дистиллят. Основная его часть идет на полнейшую переработку а некоторое кол-во возвращается в процесс в виде флегмы на орошение колонны для поддержания противоточных массообменных процессов. Кубовая жидкость также отводится на следующую стадию, Но часть через кипятильник снова возвращается в колонну.
Образование паров происходит за счет дистилляции кубовой жидкости, которая происходит за счет разности удельного веса пара и жидкости. Колонна является объектом статическим, многоемкостным, с распределенными параметрами.
Следовательно запаздывание при регулировании, например, температуры будет измеряться часами. По этому, чтобы добиться качественного регулирования и требуемой четкости разделения исх. смеси на компоненты, сначала рассматривают возможность устранения основных возмущений до объекта, которые оказывают наиболее сильные воздействия на показатель эффективности.
Вопрос 8 АСУТП
Классификация
технологического объекта управления
ТОУ-совокупность технологического оборудования и реализуемого на нем технологического режима в соответствии с требованиями технологического регламента.
1)по типу технологического процесса: а)гидравлические, б)тепловые, в)массообменные, г)механические, д)химические
2)по характеру технологического процесса: а)непрерывные, б) периодические, в)комбинированные
3)по информационной емкости: а) с минимальной
информационной емкостью (10-40технологических параметров управления), б) с
малой 41-160, в) со средней 161-
4) по количеству уравнений динамики и статики: 4.1)одномерные ТОУ, где одна входная величина и процесс описывается одним уравнением динамики, 4.2)многомерные ТОУ, содержат две и более выходные величины и число уравнений должно соответствовать числу выходных величин
ПРИМЕЧАНИЕ: входные величины могут как влиять одна на другую, так и не влиять.
4.2.1)Многомерные объекты с независимыми выходными величинами, где изменение любой из входных величин приводит к изменению только своей выходной величины.
4.2.2)Одномерные объекты со взаимосвязанными выходными величинами, где измение входной величины приводит к одновременному изменению нескольких выходных. Это объясняется наличием в ТОУ перекрестных обратных связей.
5)по характеру параметров управления
5.1) с сосредоточенными параметрами, где регулируемые величины имеют одно числовое значение в данный момент времени. Их динамика описывается обыкновенными дуфурами с постоянными коэффициентами при заданных начальных условиях.
5.2)с распределенными параметрами, т.е. регулируемые величины имеют разные числовые значения в разных точках объекта в данный момент времени. Динамика таких объектов описывается дифурами в частных производных и дополняются начальными и граничными условиями. Для упрощения их разбивают на ряд простых уравнений, при этом точность расчетов возрастает.
Вопрос 9 АСУТП
Характеристика
комбинированных САУ (САР).
Область применения: при автоматизации объектов на вход которых поступают значительные контролируемые возмущения. Существуют 2 вида комбинированных САР: 1) с подключением выхода компенсатора на вход объекта 2) с подключением выхода компенсатора на вход регулятора.
Комбинированная САР с подключением выхода компенсатора на вход объекта (САУ с компенсацией по возмущению).
Функциональная схема.
Цель управления для данного
процесса: получение упаренного раствора с заданной концентрацией.
Основные возмущения это расход питания (его изменение)
В данной схеме цель управления поддерживается регулятором концентрации.
Если же резко изменится концентрация исходного раствора, то в действие вступает регулятор раствора, который формирует корректирующий импульс по основному возмущению.
Структурная схема САР.
Где Хв – сигнал возмущения (изменение расхода исходного раствора); W0 – передаточная функция ТОУ по основному каналу регулирования концентрации; RQ - передаточная функция основного регулятора концентрации; Wв – передаточная функция ТОУ по каналу возмущения; RF – передаточная функция динамического компенсатора по каналу возмущения (в контуре регулирования возмущения).
Данная схема компенсации используется в тех случаях, когда рабочие частоты по каналу возмущения и по основному каналу возмущения соизмеримы или приблизительно равны.
Комбинирование САР с подключением выхода компенсатора на вход регулятора (САУ с компенсацией отклонения).
Функциональная схема.
Основная задача управления
поддержание концентрации дистиллята на заданном значении. Для этой цели
существует регулятор концентрации QC. Основное возмущение в данной схеме – изменение расхода
разделяемой исходной смеси, поэтому в зависимости от возмущения вводится
корректирующий импульс (вырабатываемый регулятором расхода) и работа клапана
будет зависеть от корректирующего сигнала регулятора концентрации.
Структурная схема.
Данная схема компенсации используется в тех случаях, когда динамические характеристики по каналу возмущения имеют большую инерционность (запаздывание) или когда скорость распространения сигнала в контуре компенсации много меньше чем скорость сигнала по основному каналу регулирования.
Основой расчета подобных систем является принцип инвариантности: Отклонение выходной координаты должно быть тождественно равно нулю при любых задающих или возмущающих воздействиях.
Для выполнения данного принципа необходимо два условия:1)
Идеальная компенсация всех возмущений Xв.. 2) Идеальное
воспроизведение сигнала задания Yзад.
Ни то ни другое в реальных системах физически не выполнимо, поэтому ограничиваются частичной инвариантностью по наиболее сильным возмущениям.(см. Схема 1, Схема 2)
Для выведения условий частичной инвариантности
определяем передаточные функции динамических компенсаторов RF.
Вопрос 10 АСУТП
Свойства технологический объектов
управления. Принцип инвариантности.
Для чего исследуется:
- для составления схем управления объектом
- для выбора типа регулирующего устройства
- для определения оптимальных настроек регулятора
- для получения качественных технологических процессов
Основными свойствами являются: самовыравнивание, емкость, запаздывание.
 Самовыравнивание
объекта характеризует его инерционность и устойчивость. Самовыравнивание
называется свойство устойчивости объекта устанавливающегося в равновесное
состояние самостоятельно без постороннего вмешательства после изменения его
входной величины.
Самовыравнивание
объекта характеризует его инерционность и устойчивость. Самовыравнивание
называется свойство устойчивости объекта устанавливающегося в равновесное
состояние самостоятельно без постороннего вмешательства после изменения его
входной величины.
а) самовыравнивание б) Без самовыравнивания
В объектах с самовыравниванием ступенчатое изменение входной величины приводит к изменению выходной величины со скоростью, которая постепенно уменьшается до 0. Это вызвано наличием в объекте внутренних отрицательных обратных связей. Количественная характеристика самовыравнивания – степень самовыравнивания ρ.
ρ- это отношение изменения входной
величины к изменению выходной величины по достижению объектом равновесного
состояния. ![]() Чем больше степень самовыравнивания тем меньше отклонение выходной величины от
первоначального значения. Нейтральные объекты самовыравниванием не обладают.
Для устойчивой работы требует специального применения регулятора. Чем больше
степень самовыравнивания, тем объект более управляем, причем более простыми
средствами (позиционное регулирование). Емкость присуща всем динамическим
объектам. Под емкостью понимают такое изменение входной величины, которое
приводит к изменению выходной величины на 1 за 1ый отрезок времени
Чем больше степень самовыравнивания тем меньше отклонение выходной величины от
первоначального значения. Нейтральные объекты самовыравниванием не обладают.
Для устойчивой работы требует специального применения регулятора. Чем больше
степень самовыравнивания, тем объект более управляем, причем более простыми
средствами (позиционное регулирование). Емкость присуща всем динамическим
объектам. Под емкостью понимают такое изменение входной величины, которое
приводит к изменению выходной величины на 1 за 1ый отрезок времени . Чем больше емкость объекта тем более сложный регулятор
необходимо выбирать при управлении им. Запаздывание выражается в том, что
выходная величина объекта начинает изменяться не сразу после внесения изменения,
а через какой-то промежуток времени. τ-время
запаздывания.
. Чем больше емкость объекта тем более сложный регулятор
необходимо выбирать при управлении им. Запаздывание выражается в том, что
выходная величина объекта начинает изменяться не сразу после внесения изменения,
а через какой-то промежуток времени. τ-время
запаздывания. ![]() . Все реальные объекты обладают запаздыванием, т. к.
изменение потоков вещества или энергии в ТОУ протекает с конечной скоростью.
Запаздывание отрицательное свойство объекта и при автоматизации его стараются
уменьшить: устанавливают датчики , исполнительные
механизмы как можно ближе к ТОУ; использовать молоэнерционные
средства автоматизации. По способу восстанавливать равновесные состояния
объекты бывают: нейтральные, устойчивые, неустойчивые. Эти свойства
рассматриваются в зависимости от диф. ура. ТОУ.
. Все реальные объекты обладают запаздыванием, т. к.
изменение потоков вещества или энергии в ТОУ протекает с конечной скоростью.
Запаздывание отрицательное свойство объекта и при автоматизации его стараются
уменьшить: устанавливают датчики , исполнительные
механизмы как можно ближе к ТОУ; использовать молоэнерционные
средства автоматизации. По способу восстанавливать равновесные состояния
объекты бывают: нейтральные, устойчивые, неустойчивые. Эти свойства
рассматриваются в зависимости от диф. ура. ТОУ.
Вопрос11 АСУТП
Характеристика каскадных САУ
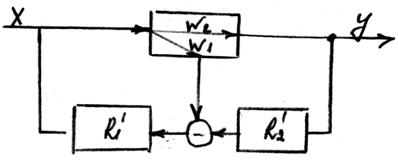
Область примениения: для управления объектами или системами, которые обладают большой инерционностью по основному каналу регулирования. Для устранения этого недостатка выбирается еще один канал регулирования по которому объект обладает меньшей инерционностью. Вводится второй регулятор, выход которого является заданием основному регулятору.
Рис структурная схема
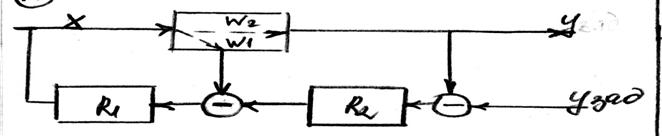
R1-внутренний регулятор по основному каналу регулирования, R2-внешний регулятор по вспомогательному или корректирующему каналу регулирования.
Основной регулятор служит для стабилизации главной выходной координаты, а вспомогательный служит для быстрой коррекции выходного сигнала. Наиболее распространенные соотношения регуляторов: П-ПИ, ПИ-ПИ, ПИ-ПИД (первый в связке-внутренний, второй-внешний). Так как внутренний регулятор обладает более высоким быстродействием, то это увеличивает качество переходного процесса.
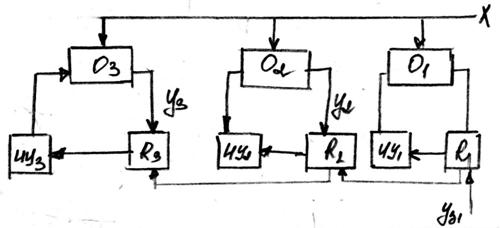
Каскадные САУ-САУ, у которых ведущий регулятор управляет несколькими вспомогательными регуляторами. При этом последние управляют своими объектами по заданию регулятора, который зависит от главного регулируемого параметра.
Рис
Вопрос 12 АСУТП
Характеристика САУ
с дополнительным импульсом по производной из промежуточной точки.
Область применения: для управления объектами, имеющими распределенность в пространстве. Особенностью таких объектов является то, счто основной регулируемый параметр является выходной величиной из аппарата. Возмущения распространены по всей длине аппарата, а управляющее воздействия подаются на его вход. При этом одноконтурные системы будут иметь низкое качество вследствие большой инерционности системы по каналу управления. Поэтому на вход регулятора подается дополнительный импульс из промежуточной точки аппарата, который дает опрежающий сигнал и регулятор начинает работать прежде, чем выходная величина начинает изменяться.

чтобы обеспечить управления без статической ошибки необходимо, чтобы в установившемся режиме дополнительный импульс исчезал. С этой целью вспомогательную координату пропускают через реальной диф звено.
Рис структурная схема системы.
Путем преобразования данная схема приводится к виду классической каскадной 2х контурной САУ. Т.е. реальной диф звено переносится по ходу через отрицательный сумматор и схема приобретает вид.
Рис
Эффективность введения дополнительного сигнала выбирается в каждом конкретном случае и обуславливается динамическими свойствами объекта (аппаратом и условиями его работы). Если точку отбора поставить в начале аппарата -это будет равносильно дополнительному импульсу по возмущению и дифференциальная составляющая будет выполнять роль динамического компенсатора. Если точка отбора находится на выходе из аппарата- это означает введение производной от основного регулируемого параметра.
Вопрос 13 АСУТП
Взаимосвязанные САУ
Область применения: для управления многосвязными объектами. Многосвязными
называются объекты с несколькими входными и выходными параметрами, связанными
между собой внутренними перекрестными связями.
Если объект обладает только прямыми внутренними связями, то объект называется односвязным. При управлении многосвязными объектами существует два подхода: 1)при несвязном регулировании учитываются только прямые каналы управления и весь объект рассматривают как ряд одноконтурных систем управления. Подход применим в том случае, если перекрестные связи слабее основных. 2)связное регулирование с применением многоконтурных САУ, в которых внутренние перекрестные связи компенсируются внешними динамическими регуляторами. Применяются тогда, когда нельзя пренебречь перкрестными связями. Структурные особенности сложных взаимосвязанных систем используются для анализа их устойчивости.
Взаимосвязанные САУ можно разделить на группы:1)системы, образованные при управлении объектом с несколькими входными и выходными параметрами, 2)каскадные САУ, 3)групповые САУ, у которых один ведущий регулятор управляет несколькими исполнительными механизмами (объектами), 4)системы, образованные связыванием системы отдельных систем управления.
 Основной принцип построения взаимосвязанных
систем - это принцип автономности. Для последней структурной схемы он значит:
независимость выходных координат У1, У2 при работе двух завкнутых
систем управления . В принципе условие автономности
складывается из двух условий инвариантности, т.е. независимости выхода У1 от возмущения Х2 и независимость У2 от Х1.
Т.о. перекрестные каналы рассматриваются как возмущения, которые компенсируются
с помощью специально вводимых динамических компенсаторов.
Основной принцип построения взаимосвязанных
систем - это принцип автономности. Для последней структурной схемы он значит:
независимость выходных координат У1, У2 при работе двух завкнутых
систем управления . В принципе условие автономности
складывается из двух условий инвариантности, т.е. независимости выхода У1 от возмущения Х2 и независимость У2 от Х1.
Т.о. перекрестные каналы рассматриваются как возмущения, которые компенсируются
с помощью специально вводимых динамических компенсаторов.
Вопрос14АСУТП
Типы взаимосвязанных САУ
Применяютмя для управления многосвязными объектами. Многосвязными называются объекты с несколькими входными и выходными параметрами, связанными между собой внутренними перекрестными связями.
Взаимосвязанные САУ можно разделить на группы: 1)системы, образованные при управлении объектом с несколькими входными и выходными параметрами.
2)каскадные САУ, у которых ведущий регулятор управляет несколькими вспомогательными. При этом последние управляют своими объектами по заданию регулятора, который зависит от главного регулируемого параметра.
Групповые САУ, у которых один ведущий регулятор управляет несколькими исполнительными механизмами (объетами).
Системы, образованные связыванием систем отдельных систем управления. Они управляют параллельно одним или несколькими параметрами.
Рис структурная схема управления 2 параметрами.
Основной принцип построения взаимосвязанных систем - это принцип автономности. Для последней структурной схемы он значит:независимость выходных координат У1, У2 при работе двух замкнутых систем управления . В принципе условие автономности складывается из двух условий инвариантности, т.е. независимости выхода У1 от возмущения Х2 и независимость У2 от Х1. Т.о. перекрестные каналы рассматриваются как возмущения, которые компенсируются с помощью специально вводимых динамических компенсаторов.
Вопрос15АСУТП
Понятие об
автоматизированных системах управлениях
АСУ-это человеко-машинная система, обеспечивающая автоматизированный сбор и обработку информации, необходимой для оптимизации управления в различных сферах человеческой деятельности. Под процессом оптимизации понимается выбор такого варианта управления, при котором достигается максимум или минимум некоего критерия управления или оптимизации. Сбор и обработка информации, вычисление критериев и нахождение оптимальных значений управляющих воздействий в АСУ осуществляется с помощью специальных технических средств. За оперативным персоналом остается задача осмысливания результатов в целом и принятия решений по оперативному управлению.
Принципы сложности создания и
внедрения АСУ: 1)несмотря на
единые технические средства и методы переработки информации каждая АСУ является
уникальной, т.к. предназначена для управления конкретным объектом со своими
характеристиками и особенностями. 2)при создании и внедрении АСУ нет
возможности проверитьее работоспособность до ввода в
эксплуатацию. Совместная работа ЭВМ и персонала начинается после отладки
рабочей программы и поэтому все недостатки устраняются уже на действующем
производстве. 3)создание АСУ заключается в постепенном наращивании ее
составляющих. Уже освоенные задачи не исключаются и незаменяются.
4)АСУ должны быть приспособляемыми, т.к. все динамические процессы меняются с
течением времени, а следовательно меняется и задача
управления ими. Ярким представителем АСУ является АСУТП.
Вопрос16 АСУТП
Характеристика
комплекса технических средств
Комплекс технических средств (КТС) включает в себя следующие устроойства:1) устройства автоматического контроля, они обеспечивают быстрое и точное измерение текущих значений технологических параметров. При контроле функции человека сводятся к определению отклонений текущих значений от заданных и выработке решений по изменинию ТП, а так же с изменением вручную положения регулирующих органов на технологическихъ магистралях.
2)устройства сигнализации предназначены для автоматического оповещения персонала об отклонении параметров за допустимые пределы путем подачи звуковых или световых сигналов. Сигнализация делится на: предупреждающую, которая предназначена для оповещения персонала об отклонении параметров за пределы, определяемые нормальным технологическим режимом; на аварийную, предназначенную для оповещения персонала о недопустимых значениях параметров или об отключении одного или нескольких агрегатов; сигнализация положения предназначена для оповещения о состоянии механизмов, о положении запарных органов в данный момент времени.
3)устройства регулирования предназначены для поддержания текущего значения параметра на заданном, с помощью специальных технических устройств. В зависимости от формы заданного значения регулирующие устройства бывают: а)стабилизирующие, когда заданное значение постоянно во времени, б)программные, когда заданное значение меняется во времени по заранее определенной последовательности, в)следящие, когда заданное значение зависти от какаго-либо другого параметра или произвольно меняется во времени, г)экстремальные, заданное значение которых соответствует экстремальному значению параметров минимуму или максимуму для данных производственных условий.
4)устройства защиты, предназначены для предотвращения аварий, пожаров, взрывов, выпуска брака или выхода из строя оборудования путем непосредственного воздействия на процесс, чтобы ликвидировать аварийное состояние с минимальными потерями для объекта.
5)устройства программно-логического управления осуществляют операции пуска, останова, перевода с одного режима на другой, в соответвии с заданной временной программой.
6)устройства блокировки предотвращают непрерывную последовательность включения-выключения машин, механизмов, аппаратов.
Вопрос 17 АСУТП
Характеристика АСУТП
АСУТП предназначен для выработки и реализации управляющих воздействий на объект. Они обеспечивают сбор и обработку информации при участи оперативного персонала в реальном режиме времени. АСУТП как один из видов систем характеризуется наличием самостоятельных функций и целей управления, а также необходимый для реализации этих функций и целей системы организации.
АСУТП это нижний уровень АСУ и для реализации управляющего воздействия на нем необходимо быстродействие и надежное вычислительное средство, а также достоверная математическая модель управляющего объекта. Степень достижения поставленных целей характеризуется критерием управления, в качестве которого могут использоваться технико-экономические показатели, такие как себестоимость продукции или технические показатели, такие как качество готовой продукции.
Характеристика АСУТП может быть представлена в виде блок-схемы:
Где 7-измерение технических параметров и сигналов объекта
4-сбор информации об объекте
1- формирование управляющего задания
3-выработка команды управления
2-реализация команд управления
5-исполнительные механизмы
6-контроль функционирования технических программных
средств
В 18 АСУТП
Классификация САУ
САУ-это совокупность оперативно-технического персонала и комплекса технических средств автоматизации, связанных общей задачей автоматизации управления.
Классификация САУ
1. По цели управления
-стабилизирующие
-оптимальные
2. По способу управления
-замкнутые
-разомкнутые
-комбинированные
3. По месту расположения технических средств
-местные
-дистанционные
4. По степени централизации управления
-одноуровневые центролизованные
-одноуровневые децентрализованные
-многоуровневые
5. По степени участия человека в управлении
-система контроля
-система регулирования или управления
-автоматизированная АСУТП
-АСУ производством
6. По числу регулируемых величин
-одномерные
-многомерные
7. Похарактеру регулируемых воздействий
-непрерывные
-релейные
-импульсные
Основным показателем, с помощью которого характеризуют функционирование системы в целом является цель управления-это высокоэффективная работа системы, которая оценивается критерием управления, числовое значение этого критерия зависит от возмущающих и управляющих воздействий и обычно в его качестве принимаются выходные параметры процесса, которые характеризуют целевой продукт.
В стабилизирующих системах цель управления -это поддержание критериев управления на постоянном заранее заданном значении.
В оптимизирующих системах цель- поддержание критериев управления на экстремальном для создавшейся производственной ситуации значении с соблюдением всех ограничительных условий.
В замкнутых системах управляющее воздействие формируется в зависимости от отклонения текущего значения критерия управления от заданного. Одним управляющим воздействием компенсируются все возмущения, что не обеспечивает высокого качества управления.
В разомкнутых системах формируется управляющее воздействие формируется управляющее воздействие в зависимости от возмущения, которое устраняется до объекта. Но в этом случае критерий управления равен заданному лишь при ликвидации всех возмущений, что физически не возможно. Следовательно данная система тоже не достаточно эффективна. Недостаток-отсутствие информации об результатах управляющего воздействия, что может привести к большим отклонениям регулируемой величины от заданного значения.
РИС ДК-динамический компенсатор.
В комбинированных системах используется принцип формирования управляющих воздействий как разомкнутых так и замкнутых систем управления. Обычно в основе лежит замкнутая система с обратной связью, а для улучшения качества управления часть возмущений ликвидируется дополнительным регулятором. R1-замкнутый контур, R2-разомкнутый контур.
РИС
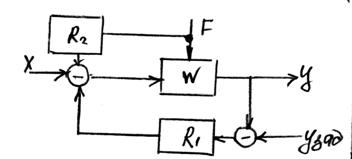
Наиболее совершенный вид комбинированнных САУ-инвариантные системы. Инвариантность- это незкависимость какого-либо параметра от действующих на систему возмущений. Она достигается путем введения в САУ связей по возмущающим воздействиям (R2-связь по возмущению). При соблюдении условий абсолютной инвариантности управляемая величина абсолютно не зависит от возмущающих воздействий. Т.е. ее отклонение от заданного значения тождественно равно 0 при возмущениях не равных 0.
Одноуровневая централизованная обеспечивает управление несложными объектами, рсаположенными компактно на одной небольшой территории.
Одноуровневая децентрализованная упраляет несложными ТОУ с большим числом территориальных рассредоточенных установок.
Многоуровневая система обеспечивает управление сложными технологическими комплексами и разнесенными установками как единым целым.
Одномерные системы имеют одну регулируемую величину.
Многомерные системы имеют несколько регулируемых величин и делятся на системы: связанного регулирования и несвязанного.
Непрерывные(аналоговые) построены так, что непрерывное изменение входной величины приводит к непрерывному изменению выходной.
Релейные системы-где непрерывное изменение входной величины приводит к дискретному изменнению выходной.
Импульсные системы, где непосредственное изменение входной величины приводит к изменению выходной величины.
Вопрос19 АСУТП
Цели и задачи АСУТП.
В АСУТП решаются следующие задачи:
1) автоматизация управления процесса с применением ЭВМ и экономико-математических методов для выдачи рекомендаций или управляющих воздействий по критерию оптимальности;
2) повышение эффективности действующих СУ.
Основная задача АСУТП: оптимальное управление процессом, при котором в соответствии с математической моделью объекта достигается выбранный экономический показатель при заданных ограничениях на ведение процесса в реальных условиях и в реальном времени.
Вопрос20 АСУТП
Разработка САУ.
Основные положения.
Разработка осуществляется по следующему алгоритму:
1)изучаются свойства объекта управления или технологический процесс в целом и определяются его особенности,
2)ставится задача управления и определяются показатели эффективности процесса,
3)выбираются регулируемые параметры и канала внесения регулирующих воздействий,
4)выбираются контролируемые параметры,
5)выбираются сигнализируемые параметры,
6)определяются мероприятия по защите и блокировке оборудования,
7)выбираются технические средства автоматизации процесса,
8)выполняется функциональная схема автоматизации процесса,
9)описывается работа выбранных систем регулирования, контроля, сигнализации,
10)определяется уровень автоматизации ТП.
Вопрос21 АСУТП
Требования,
предъявляемые к АСУТП:
1) АСУТП должна обеспечивать управление объектом по заданному критерию управления с целью повышения технико-экономических показателей.
2) Для работы в режиме реального времени функции сбора обработки информации и выработки командных воздействий должна осуществляться автоматически.
3) АСУТП должна подготавливать и передавать информацию на выше стоящие уровни управления и осуществлять управление процессом в соответствии с требованиями спущенными сверху.
4) АСУТП должна обладать функциями совместимости по информационному, техническому и программному обеспечению со смежными, нижними и выше стоящими уровнями автоматизации.
5) АСУТП должна иметь необходимое метрологическое обеспечение для проведения поверок технических средств и измерительных каналов.
6) АСУТП должна соответствовать основным показателям надежности .
7) АСУТП должна обладать возможностью дальнейшего усовершенствования.
Вопрос 22 АСУТП
Особенности
описания ТП и ТОУ.
Объект и система управления рассматриваются в совокупности , что позволяет определить степень участия человека в упралении. На первом этапа изучаются свойства и характеристики исходных, промежуточных конечных продуктов; их токсичность, взрывооопасность, пожароопасность, температура кипения, плавления и т.д.
Данные исследований представляются в табличной форме. На втором этапе исследуются динамические и статические характеристики технологического оборудования или аппарата, их конструктивные особенности, их класс взрыво-пожароопасности производственных помещений. В третьих устанавливаются предельные значения режимных параметров(максимальные температура, уровень, давление внутри аппарата). В четвертых определяют статические и динамические характеристики ТОУ в целом. Существуют следующие способы определения характеристик: аналитические, экспериментально активные, экспериментально пассивные.
Аналитический метод исследования характеристик ТОУ
 Для
определения статической характеристики этим методом составляются уравнения,
связывающие входные параметры ТОУ с выходными в установившемся режиме. Затем
задаются любые значения входных величин и по уравнению находятся выходные.
График связывает выходные и входные значения, являющиеся статической
характеристикой.
Для
определения статической характеристики этим методом составляются уравнения,
связывающие входные параметры ТОУ с выходными в установившемся режиме. Затем
задаются любые значения входных величин и по уравнению находятся выходные.
График связывает выходные и входные значения, являющиеся статической
характеристикой.
Динамические характеристики аналитическим методом определяют математическую модель ТОУ. Решение данного диф уравнения будет динамической характеристикой.
Достоинства:метод можно использовать на стадии проектирования ТП.
Недостатки: реально действующие объекты обладают множеством особенностей, которые трудно учесть при мат моделировании. Поэтому метод применяется для сравнительно простых ТОУ.
Экспериментально-активный
метод исследования характеристик ТОУ
Заключается в нанесении на вход объекта стандартных строго регламентированных возмущений (скачок, синусоидальный импульс) и снятии реакций ТОУ на эти возмущения. Т.о. получают динамические характеристики объекта. Чтобы получить статическую характеристику по диаграммам в установившемся режиме для одних и тех же значений времени снимают входные и выходные параметры и строят зависимость. У=F(х).
При исследовании сложных объектов с большим числом взаимосвязанных параметров динамические характеристики снимаются для всех типов возмущения и при всех режимах работы.
Достоинства: метод относительно прост, не требует большого количества времени для снятия характеристик и обработки результатов.
Недостатки: не все действующие процессы допускают внесения на вход каких-либо возмущений, в некоторых процессах это может привести к аварии, выпуску брака.
Экспериментально-пассивный
метод исследования характеристик ТОУ
Заключается в фиксации данных нормальной работы оборудования в течение длительного периода времени (6-12 месяцев), затем данные обрабатываются с получением статических и динамических характеристик.
"-" требует длительного времени для обработки результатов и снятия харктеристик, а также больших вычислительных мощностей.
"+" самый точный метод.
Исходными данными для анализа ТОУ служат мат модель процесса (динамическая характеристика) и статическая характеристика объекта, которая чаще всего представляется в виде материального и теплового баланса. С учетом этих характеристик и условия реальной работы ТОУ все факторы, влияющие на него делятся на следующие группы: 1)возмущения, допускающие стабилизацию - это независимые технологические параметры, которые испытывают существенные колебания или изменения, но их можно устранить до входа в объект. 2) контролируемые возмущения- параметры, которые можно измерить, но нельзя изменить.(состав или концентрация исх. вещества, и т.д.).
3)неконтролируемые возмущения - параметры, которые невозможно или нецелесообразно измерять (факторы окружающей среды: влажность, температура, скорость ветра). 4) возможные регулирующие воздействия- это материальные и энергетические потоки, которые можно целенаправлено автоматически изменять с целью стабилизации выходных параметров. 5)выходные переменные (регулируемые величины)- параметры, изменение которых свидетельствует о нарушении теплового и материального баланса в ТОУ.
Вопрос 23 АСУТП
Функции АСУТП структура АСУТП
Для определения функций АСУТП выбираются соответствующие технические средства и разрабатываются программное и организационное обеспечение . Функции АСУТП определяются как ее действия , направленные на реализацию частных целей управления. В зависимости от конечных результатов функции АСУТП делятся на:
-информационные
-управляющие
-вспомогательные
Информационные функции
- это функции , содержанием которых является обработка и представление информации о состоянии автоматизированного технического комплекса, предоставление информации оператору , персоналу или передача этой информации для последующей обработки . к ним относятся:
-функции централизованного контроля и измерения технологических параметров
-косвенные измерения, вычисление оптимальных характеристик процесса , формирование и выдача данных оператору или персоналу , обобщенная проверка и оценка состояния технологического комплекса, контроль получаемой информации на достоверность, контроль и сигнализация отклонения основных параметров , прогнозирование тенденций протекания технологического процесса и состояния оборудования , координация работы различных участков производства, изменение режима работы процесса в соответствии с указаниями , автоматическое перераспределение петоков между аппаратами, анализ аварийных ситуаций…
Управляющие функции
-это функции, результатами которых являются выработка и реализация управляющих воздействий на объект. К ним относятся:
1) функции регулирования и стабилизации отдельных параметров
2) однотактное логическое управление отдельными операциями или аппаратами
3) программное логическое управление группой оборудования
4) оптимальное управление установившимися или переходными режимами
5) адаптивное управление процессом в целом
Все управляющие функции отличаются своей направленностью на конкретного потребителя либо отдельный объект либо персонал либо весь технологический процесс в целом.
Вспомогательные функции.
К ним относятся следующие внутрисистемные задачи:
- обеспечение нормального функционирования всех технических средств, начиная с первичных датчиков и заканчивая высоким уровнем управления
- обеспечение выполнения информационных и управляющих функций и выполнение задач по совершенствованию программного обеспечения.
Структура АСУТП
Для определения компонентов, образующих комплекс АСУТП, рассматриваются структуры, которые отражают взаимосвязь этих компонентов и структуры принято делить на:
-техническую
- функциональную
- информационную
- организационную
Техническая структура АСУТП
Определяется выбранным комплексом технических средств (эл-е, пнев-е, гидр-е и смешанные) и в зависимости от режимов функционирования техническая структура меняется( добавляются или убираются блоки), что влечет за собой изменение организационного или информационного обеспечения.
Рис
1) датчики технологических параметров
2) ПЭП
3) Вторичные приборы и регуляторы
4) ЭПП
5) ИМ
6) устройство связи с объектом
7) управляющий вычислительный комплекс
8) пульт оператора технолога
Функциональная структура
Определяется выбранными функциями АСУТП которые формируются в процессе ее действия. Эта структура содержит 3 этапа: контроль, анализ и принятие решения управления.
На первом этапе осуществляется сбор и обработка информации о состоянии объекта. На втором этапе проводится анализ технологического процесса, состояние оборудования и принимаются решения по управлению. На третьем этапе в зависимости от режима функционирования либо формируется рекомендации операторному персоналу, либо непосредственно реализуется управляющее воздействие.
Рис
1) датчики технологических параметров
2) фильтрация нормализованного сигнала
3) усреднение и интегрирование параметров
4) расчет реальных параметров
5) сравнение с заданными значениями
6) сигнализация об отклонениях
7) анализ и прогнозирование ТП
8) расчет технико-экономических показателей
9) оперативное отображение информации
10) печать материально-энергитического баланса
и составление режимных листов
11) принятие решения по управлению
12) подготовка информации в АСУТП
13) выдача рекомендаций оперативному персоналу
14) оперативное управление
15) корректировка коэффициентов мат. модели
16) прием информации из АСУТП
17) передача информации в АСУТП
I контроль, II анализ, III управление.
Информационная структура АСУТП (ИС)
ИС характеризуется схемами информационных потоков для контроля и управления объектами в зависимости от режимов функционирования выбранного комплекса технических средств (КТС) и количества операторов.
ДТП – датчики технологических параметров
УЦУ – устройство централизованного управления
УВК –
управляющий вычислительный комплекс
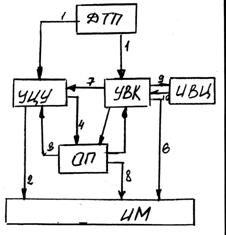
ИВЦ – информационно-вычислительный центр
ОП – оперативный персонал
- Информация о состоянии объекта и оборудования
- Передача управляющих воздействий
- Ручное изменение установок (задания)
- Отображение информации
- Корректировка управляемых воздействий
- Непосредственное цифровое управление
- Автоматическое изменение установок и задания
- Ручное управление
- Передача информации в АСУП
- прием информации из АСУП
Информация от датчиков, установленных на объекте, в виде аналоговых или дискретных сигналов после преобразования поступает на устройство централизованного контроля и управления. ОП получает информацию об объекте от вторичных приборов или видео терминалов. При необходимости оперативного вмешательства в процесс управления оператор меняет настройки регуляторов. Для оценки работы объекта и ОП через заданный промежуток времени автоматически рассчитываются экономические показатели и режимные листы процесса. Передачу управляющих воздействий на ИМ осуществляется через устройства локального управления или из УВК. С помощью УВК информация о состоянии объекта передается на вышестоящие уровни управления и принимаются корректирующие воздействия.
Организационная структура АСУТП
Определяет отношение между членами ОП и их связь с функциональными службами предприятия.
Вопрос24АСУТП
Особенности выбора
регулируемых параметров и каналов внесения регулирующих воздействий.
Для того , чтобы регулировать параметры, необходимо выполнение следующих условий: 1) Необходимо иметь техническое средство автоматизации, которое отвечало бы требованиям процесса: а) заданная точность; б) заданный диапазон измерений; в) быстродействие; г) дальность передачи информации. И могли бы работать в условиях данного процесса. 2) Необходимо иметь канал внесения регулирующего воздействия. Причем, если таких каналов несколько- выбирается тот, по которому ТОУ обладает меньшим запаздыванием или тот, по которому в объект проникает наибольшее число возмущений. 3) Необходимо, чтобы выбранная САУ обеспечивала требуемое качество процесса.
Чаще всего регулировать непосредственно основной показатель эффективности не представляется возможным. Тогда устанавливаются зависимости качества от других максимальных параметров (t, Q,P и т.д. ) и рассматриваются возможности их регулирования. Причем особое внимание обращают на стабилизацию входных параметров. Затем рассматривают возможность регулирования режимных параметров. ПРИМЕЧАНИЕ: система управления ТП в первую очередь составляется из одноконтурных замкнутых систем. Если заданного качества достичь не удалось, сначала рассматривают возможность усложнения управляющего устройства (П,ПИ,ПИД) и только затем усложняют структуру системы управления( комбинированные, многоконтурные САУ, каскадные). При этом необходимо проверить систему управления на наличие взаимосвязанных параметров, т.е. регулирующие воздействия должны вноситься т.о., чтобы ослабились внутренние связи между отдельными параметрами.
Вопрос25 АСУТП
Особенности выбора
контролируемых параметров
При выборе контролируемых параметров необходимо учитывать следующие положения:
1)Необходимо стремиться к снижению себестоимость готового продукта за счет уменьшения числа точек контроля.
2)Для качественного ведения ТП необходимо как можно больше информации о нем , что достигается путем увеличения числа контролируемых параметров. Т.о. с учетом этих условий в качестве контролируемых выбираются:
а)все регулируемые параметры
б)нерегулируемые режимные параметры
в)входные и выходные параметры при изменении которых в объект поступают возмущения
г)параметры, характеризующие взрыво и пожароопасность объекта (данные параметры обязательно регистрируются).
д) параметры характеризующие готовый продукт (расход, концентрация).
е) параметры значения которых знать для технико экономических расчетов (расход энергии, продуктов)
Вопрос26 АСУТП
Характеристика
технической структуры АСУТП
Для определения компонентов, образующих комплекс АСУТП рассматриваются структуры, которые отражают взаимосвязь этих компонентов. Структуры принято делить на: 1)техническую, 2)функциональную, 3)информационную, 4)организационную.
Техническая структура АСУТП определяется выбранным комплексом технических средств, т.е электрические, гидравлические, пневматические или смешанные. И в зависимости от режима функчионирования техническая структура меняется, что влечет за собой изменение организационного и информационного обеспечения.
1-датчик технологических параметров, 2-ПЭП, 3-вторичные приборы и регуляторы, 4-ЭПП, 5-ИМ, 6-устройства связи с объектом, 7-управляющий вычислительный комплекс, 8-пульт оператора.
Вопрос 27 АСУТП
Характеристика
функциональной структуры АСУТП
Для определения компонентов, образующих комплекс АСУТП рассматриваются структуры, которые отражают взаимосвязь этих компонентов. Структуры принято делить на: 1)техническую, 2)функциональную, 3)информационную, 4)организационную.
 Функциональная
структура АСУТП определяется выбранными функциями АСУТП, которые формируются в
процессе ее действия. Эта структура содержит 3 этапа:
Функциональная
структура АСУТП определяется выбранными функциями АСУТП, которые формируются в
процессе ее действия. Эта структура содержит 3 этапа:
1)контроль, 2)анализ и принятие решений, 3)управление.
На первом этапе осуществляется сбор и обработка информации о состоянии объекта. На втором проводится анализ ТП, состояние оборудования и принимаются решения по управлению. На третьем этапе в зависимости от режима функционирования либо формируются рекомендации оперативному персоналу, либо непосредственно реализуются управляющие воздействия.
1-датчик технологических параметров,2-фильтрация и нормализация сигналов, 3-усреднение и интегрирование параметров, 4-расчет действительных значений параметров, 5-сравнение с заданными значениями, 6-сигнализация об отконениях, 7-анализ и прогнозирование хода ТП, 11-принятие решений по управлению, 8-расчет технико-экономических показателей, 9-оперативное отображение информации, 10-печать материального и энергетического баланса, составление режимных листов, 12-подготовка информации в АСУП, 13-выдача рекомендаций оперативному персоналу, 14-оперативное управление, 15-корректировка коэффициентов мат модели, 16-прием информации из АСУП, 17-передача информации в АСУП.
Ι-контроль, ΙΙ-анализ, ΙΙΙ-управление.
Вопрос28 АСУТП
Особенности выбора
мероприятий по защите и блокировке.
После срабатывания сигнализирующих устройств персонал обязан принять меры по ликвидации нежелательных явлений в процессе. Если действия персонала не эффективны должны сработать автоматические средства защиты, которые по заранее разработанной программе перераспределяют материальные и энергетические потоки, отключают основные и включает резервное оборудование с целью предотвращения взрыва, пожара, аварии. Возврат оборудования в нормальное рабочее состояние осуществляется оперативным персоналом после выяснения причин неполадок. Способы защиты разрабатываются с учетом особенностей объекта и основное внимание уделяется его взрывоопасности. Для снижения взрывоопасности оборудование и процесса в целом применяются следующие методы:
1)предотвращение пожаров и взрывов внутри оборудования,
2)защита оборудования от разрушения,
3)максимальное ограничение различных выбросов из оборудования в атмосферу или производственные помещения,
4)предотвращения пожаров по всему периметру производства, для этого устанавливается ручная или автоматическая противопожарная защита. Устройства автоматической блокировки предназначены для предотвращения неверных пуска или останова оборудования и хода процесса (чтобы не выполнялась последующая операция при невыполнении предыдущей).
Вопрос 29 АСУТП
Характеристика
информационной структуры АСУТП
Для определения компонентов, образующих комплекс АСУТП рассматриваются структуры, которые отражают взаимосвязь этих компонентов. Структуры принято делить на: 1)техническую, 2)функциональную, 3)информационную, 4)организационную.
Информационная структура АСУТП характеризуется схемами информационных потоков для контроля и управления объектами в зависимости от режима функционирования, выбранного комплекса технических средств.
ДТП-датчик технологических параметров, УЦУ-устройства централизованного управления, УВК-управляющий вычислительный комплекс, ИВЦ-информационный вычислительный центр, ОП-оперативный персонал, ИМ-исполнительнй механизм,
Потоки:1-информация о состоянии объекта и оборудования, 2-передача управляющих воздействий, 3-ручное изменение задания, 4-отображение информации, 5-корректировка управляющих воздействий, 6-непосредственное цифровое управление, 7-автоматическое изменение установок и задания, 8-ручное управление, 9-передача информации в АСУП, 10-прием информации из АСУП.
Информация от датчиков, установленных на объекте в виде аналоговых и дискретных сигналов после преобразования поступает на устройство централизованного контроля и управления. Оперативный персонал показывает информацию об объекте от вторичных приборов или видеотерминалов. При необходимости вмешательства в процесс управления оператор меняет настройки регуляторов. Для оценки работы объекта и оперативного персонала через заданные промежутки времени автоматически рассчитываются экономические показатели и режимные листы процесса. Передача управляющих воздействий на ИМ осуществляется через устройства локального регулирования или из УВК. С помощью УВК информация о состоянии объекта передается на вышестоящие уровни управления и принимаются корректирующие воздействия.
Вопрос 30 АСУТП
Особенности выбора технических средств
автоматизации.
Выбор
ТСА осуществляется технически грамотно и
экономически обосновано. Предпочтение по возможности отдается отечественным
средствам автоматизации и выбирается из числа серийно выпускаемых.
При этом необходимо учитывать следующие требования.
1.
Выбранные средства автоматизации должны без сбоев работать в условиях
технологического процесса т.е быть не восприимчивы к
вибрации.
2.
Должны удовлетворять требуемой точности, к требуемой дальности передачи
информации требуемый инерционностью.
3.
Средства измерения должны отвечать тому техническому параметру для измерения которому предназначен.
4.
Необходимо выбрать средства автоматизации с таким и метрологическими
характеристиками, которые обеспечивали бы заданное качество (не вносили
достаточно большое запаздывание).
5.
При выборе средств автоматизации нельзя допускать большого разнообразия
номенклатуры, что бы снизить затраты на ремонт и обслуживание.
6.
при большом числе контролируемых параметрах предпочтение отдается многоточечным
приборам или МП технике.
7.
При равенстве всех предыдущих условий предпочтение отдается наиболее основным
приборам.